Космодесантник очнулся в теле маленького человечка который шел по коридору средней школы номер 37. Стены были покрашены в стандартную для всех коридоров СССР темно-зеленую краску, с салатовой полоской на высоте выше человека. Выше была побелка. Только что закончилось Священное Лѣто 1980-го и начался 17 год цикла (1981). И он уже выбрал себе избранницу. Но не ту невысокую фигуристую брюнетку из Испании с немного кривыми ногами и похожую на Красную шапочку из фильма для детей, которая будоражила его с 5 лет во снах, а ту стройную и воздушную девочку, с которой играл во дворе в прически на одуванчиках. Она приехала со своими родителями из Беларусии и у неё были редкие для северных мест чисто Белые волосы.
Первокласник шел по коридору в столовую полностью задумавшись и одновременно касаясь стены пальцем. Он не знал почему он это делал. Возможно это был рефлекс оставшийся после перерождения. Потому что у себя в звездной системе Гияд на транспортном большом корабле в рубке управления он отвечал за навигацию. Ему всегда при любых условиях нужно было сохранять физический контакт с полем проекции пути в пространственно-временном континиуме. Этот экран был размером со всю стену просторной рубки и управлялся мыслями, но физический контакт с акустическими волнами вибрации транспорта нужно было сохранять до остановки корабля или его посадки. На экране был бесконечный жёлтый граф с точками красных и зеленых цветов, которые неспешно мигали. И слышались постоянные шорохи сложной звуковой системы оповещения нормальной работы Живого Корабля.
Мальчик очнулся с мыслью, которая просто была выгравирована огромными золотыми буквами у него в голове – “Я инопланетянин”.
Этого паренька во дворе дразнили ягнёнок из за его странной фамилии. Двор был не далеко от школы, нужно было пройти мимо гаражей инвалидов и перейти дорогу. Детский садик в который “Ягненок” ходил накануне с мамой или папой был гораздо дальше по этой дороге, но тоже близко. Хотя в морозные зимы в тех краях северного города приходилось закутывать детей в огромные шерстяные платки, чтоб оставались открытыми только глаза.
К своему рождению космодесантник готовился досконально, он выбирал простое племя, которое объединило бы всех основных генетических предков проживавших на этом острове минимум 12 000 лет. От момента поломки системы температурной стабилизации планеты из за падения Луны Фатты в 13034 Лѣто от Великой Стужи и (Великого Похолодания) (11 008 до р.х.)
И его прибытие вместе с остальными звездными семенами не осталось не замеченным у тёмных. Те кто имели на планете Земля доступ к подземным генераторам выкрутили ручку на максимум. Что привело к полному температурному блокауту огромной части СССР. Даже больницы промерзли до инея. Все эта сырость и холод вместе со специально привезенными на планету Бактериями должна была убить не только звездный посев, но и других маленьких детей.
Но темные просчитались. Не учли что племя Чудь Белоглазая сохраняло себя на этом острове 12 000 лет. Благодоря двум секретам. Живой закваске для хлеба и обязательным брожением овсянки перед варкой овсяного киселя приготовленного с любовью. А так же чистой черникой с болот. А племя меря знало как выводить любую отраву из крови за счет компресса пчелинного мумиё с водкой. Детей удалось сохранить, хоть и не без последствий.
С 5 лет этих детей готовили. Рассказывали им про гипноз. Показывали как переферийная сенсорная система человека может обманывать центральную нервную систему. Учили образному мышлению.
Где то около 6 лет, при строительстве гаража мальчик не заметил кесон для закаток и картошки, глубиной 2 казенные сажени зарытый в ровень с полом. Там было немного песка на дне. Самого момента полета вниз он не помнил, но запомнил что просто приземлился на ноги, как будто спустился туда медленно, опираясь о воздух, а на дне была постелена мягкая подушка. Но его родители, на всякий случай привезли его в травмпункт поздно ночью. Там они долго сидели возле медицинского кабинета. И рядом с ними ждал другой мальчик, который упал в горячий гудрон и весь был покрыт черной смолой с ошметками толстой целофановой пленки. И он тоже сидел и ждал врачей, как ни в чём не бывало, и даже не плакал…..
Когда звездный посев вырос до 12 лет. Прошёл год Крадущегося Лиса и наступил год Свернувшегося Ежа. Командные бункеры ядерного щита СССР законсервировали, продовольствие вывезли из их обширных складов. Даже часть кабельной системы переключили на странные вещи с названием АСУ(ТП). Аватары получили прямую мысленную команду в виде пространной лекции.
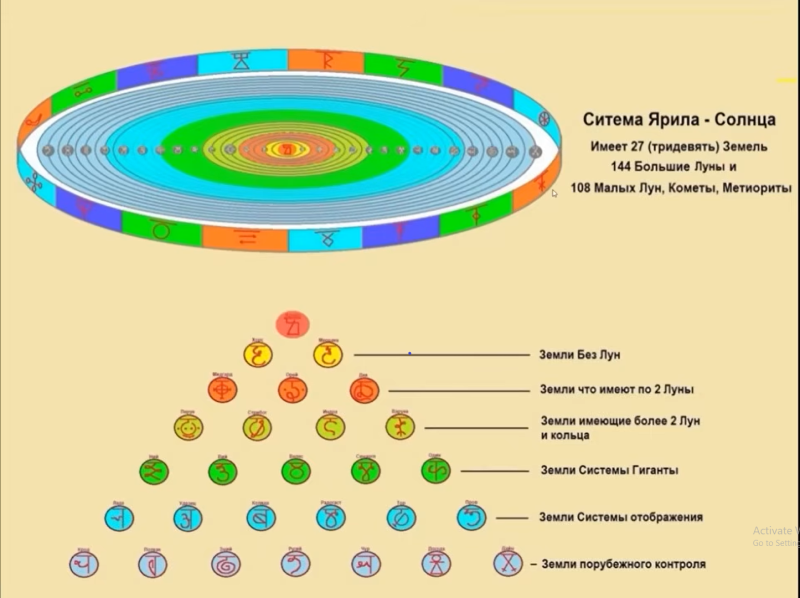
Все кто смог выйти на приём должны были решить для себя будут ли они открывать портал, для приема делегации с одной из Земель Системы отображения, Которые располагались внутри периметра Земель Порубежного контроля (Проще говоря мощнейшими голографическими установками, которые могли работать на всех частотах всех полей с сигнатурой пространства равной 7. То есть мысленный канал оставался открытым и не искаженным, но требовал сложнейшего стечения обстоятельств для передачи сообщения до цели). Квантовую вероятность прохождения отклонения нейтронного поля внутри кварковой системы атомов в конкретном месте нужно было скорректировать.
Для открытия портала надо было разместить на восточной и южной стене комнаты два черных символа на листе белой бумаги. Символы были индивидуальные и отличались друг от друга. За все время было всего лишь две возможности для короткого визита. Первая группа заходила с юго восточной стороны, открыв портал прямо в районе входной двери в прихожей соседней с комнатой. А вторая через несколько месяцев с Северной стороны просто припарковав летающую плоскую виману снаружи окна на 5 этаже здания, на уровне подоконника.
Они выглядели как голубые огненные люди. Дальше Ягненок ничего не помнил. Но один из этих странных созданий уснул в нём. Он просыпался, только в случае совершенно не совместимых с жизнью ситуаций. Но в целом так и не научился управлять телом. Зато отлично в редкие моменты бодрствования изменял пространство вокруг Аватара. У него была вспомогательная но важнейшая миссия – просто сохранить в целости и невредимости тело космодесантника. При этом вопрос был только о сохранности костей в основном. То что могло зажить за период от 2 недель до нескольких месяцев травмой не считалось.
К 14 Лѣтам, изучив СФВ и сделав расчет смещения перигелия Меркурия по классической теории без применения Общей теории относительности (ОТО) Эйнштейна. Вычисления сошлись. Он написал письмо на центральное детское радио СССР, даже лично встретился с ведущим передачи для детей про науку. Ведущий передачи, потом из Москвы прислал ему приглашение на досрочные экзамены в МФТИ. Но нужно было дождаться окончания школы. Было время чтоб изучить мемуары основных Классиков науки физики, а затем и Теорию Черных Дыр – Чандрасекара и Геометрию и физику узлов – Атья.
Существа с созвездия Гияд не были известны, как однозначные союзники Землян и их генетических предков к которым относили Плеядианцев, Сирианцев, Андромедианцев и Арктурианцев. Деятельность Гиядианцев была скрыта в тени “Стожар” или “Семи Сестер” или Туманность Плеяд (M 45) и относились к категории жизни более высокой размерности. Что делало их совершенно беспомощными в плане управления телами на Земле. Но для потдержания хрупкого баланса между другими ИноЗемцами требовалось их присутствие на планете Земля. Они как и все больше всего эмоционально были привязаны к “Шоу героев” с Земли.
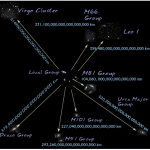
Потому что на Земле проходит последня битва Асов перед рассветом, когда рукав Млечного пути находится на конце Сверхскопление галактик Ланиакея, и постепенно переходил в зону контроля сил условного “света”, хотя и “светлая” и “темная” сторона делали все ради развития душ каждого существа в нашем Сверхскоплении галактик.

Ланиакея (Laniakea) — сверхскопление галактик, в котором, в частности, содержатся Сверхскопление Девы (составной частью которого является Местная группа, содержащая галактику Млечный Путь с Солнечной системой) и Великий аттрактор, в котором расположен центр тяжести Ланиакеи.
Сверхскопление Девы
Сверхскопление Девы — нерегулярное сверхскопление галактик размером около 200 миллионов световых лет, включающее Местную группу галактик, скопление галактик в Деве и несколько других скоплений и групп галактик. Всего в состав Местного сверхскопления входят как минимум 100 групп и скоплений галактик (с доминирующим скоплением Девы в центре) и около 30 тысяч галактик; его масса по порядку величины 1015 масс Солнца (2·1045 кг). Поскольку его светимость слишком мала для такого количества звёзд, считается, что на большую часть массы сверхскопления приходится масса тёмной материи. Сверхскопление Девы притягивается к гравитационной аномалии под названием Великий аттрактор, которая расположена рядом со скоплением Наугольника.
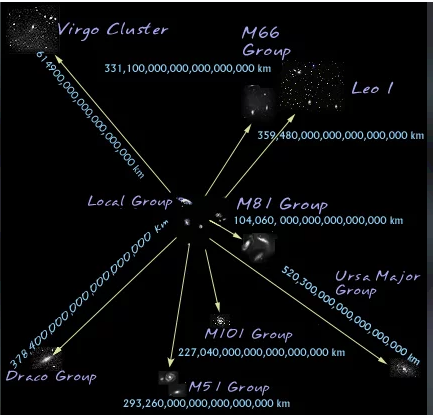
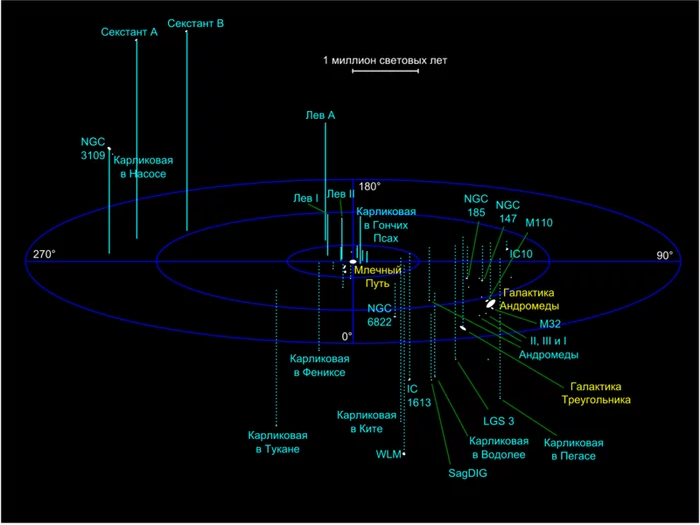
Местная группа
Местная группа галактик — гравитационно связанная группа галактик, включающая Млечный Путь, Галактику Андромеды (M31) и Галактику Треугольника (М33).
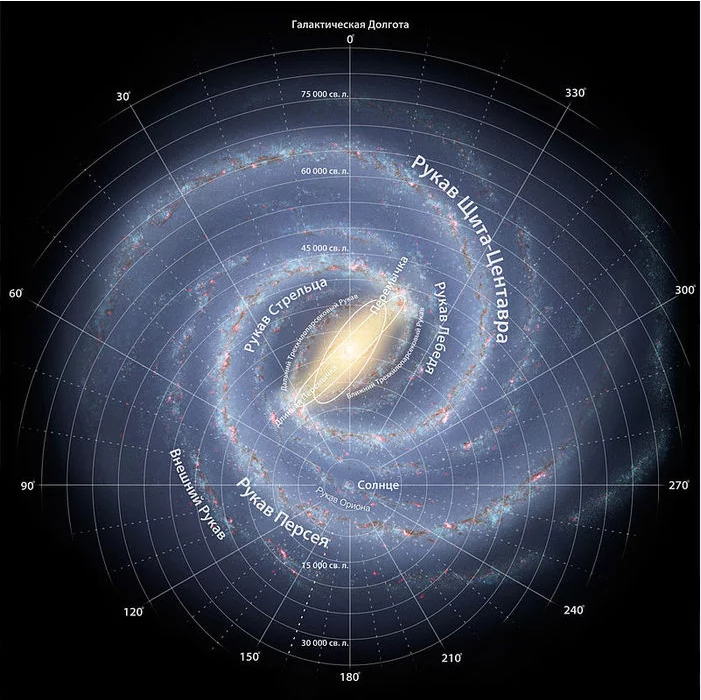
Галактика Млечный Путь
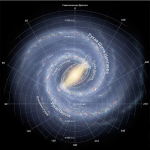
Млечный Путь — галактика, в которой находятся Земля, Солнечная система и все отдельные звёзды, видимые невооружённым глазом. Относится к спиральным галактикам с перемычкой.
Рукав Ориона

Рукав Ориона — небольшой галактический рукав Млечного Пути, в котором находится наша Солнечная система. Толщиной приблизительно в 3500 световых лет и приблизительно 11 000 световых лет в длину. Иногда он также называется Местный рукав или Шпора Ориона.
Рукав Ориона обязан своим названием находящимся вблизи него звёздам из Созвездия Ориона. Он расположен между рукавом Стрельца и рукавом Персея (двумя крупными рукавами Млечного Пути). В рукаве Ориона Солнечная система находится вблизи внутреннего края в Местном пузыре, приблизительно в 8500 парсеках от центра Галактики (смещение к Северному полюсу Галактики составляет всего 10 парсек).
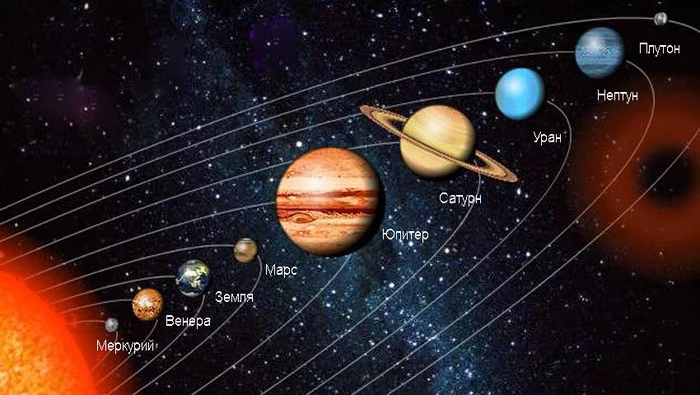
Солнечная система

Солнечная система — планетная система, включающая в себя центральную звезду — Солнце — и все естественные космические объекты, обращающиеся вокруг Солнца. Она сформировалась путём гравитационного сжатия газопылевого облака примерно 4,57 млрд лет назад.
Большая часть массы объектов Солнечной системы приходится на Солнце; остальная часть содержится в восьми относительно уединённых планетах, имеющих почти круговые орбиты и располагающихся в пределах почти плоского диска — плоскости эклиптики. Общая масса системы составляет около 1,0014 M☉.
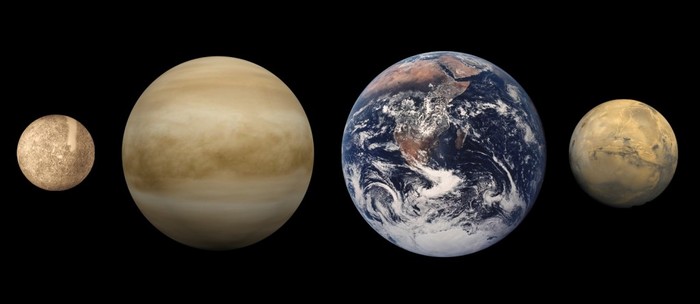
Планеты земной группы
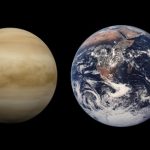
Планеты земной группы. Слева направо: Меркурий, Венера, Земля и Марс (размеры в масштабе, межпланетные расстояния — нет).
Земля
 Место первого преземления 1,5млрд Лѣто от прибытия на Мидгард первой вайтмары Великой Расы Рода небесного
Место первого преземления 1,5млрд Лѣто от прибытия на Мидгард первой вайтмары Великой Расы Рода небесного
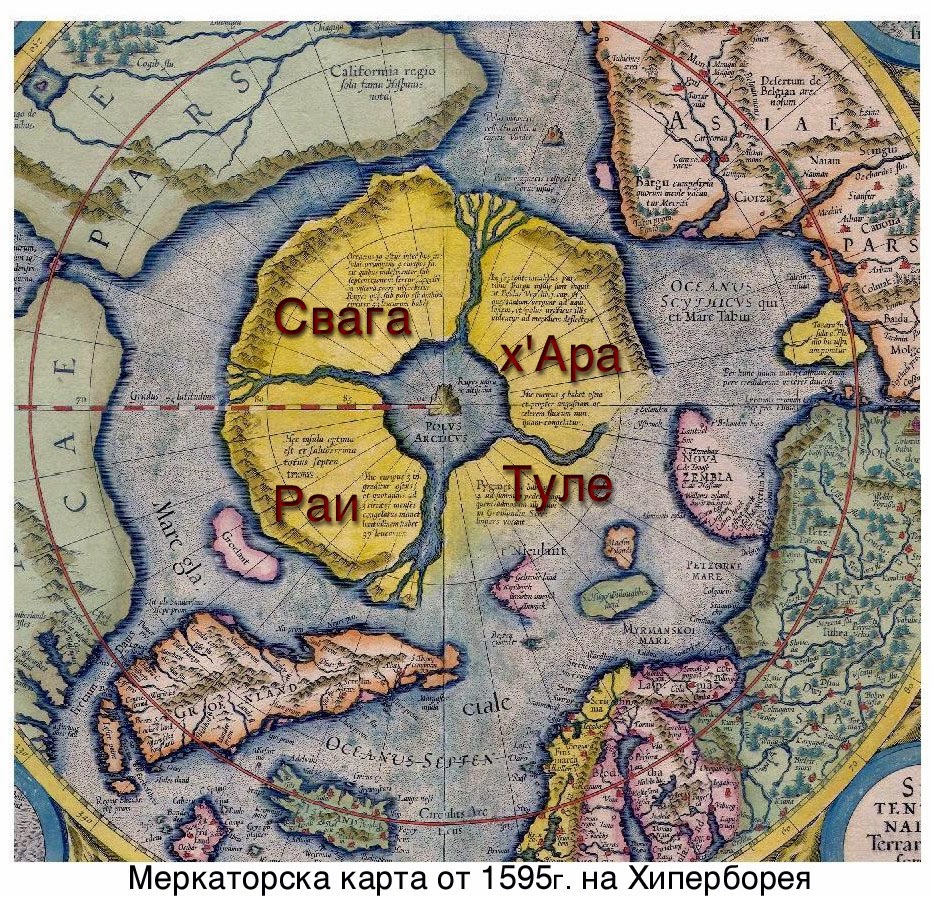
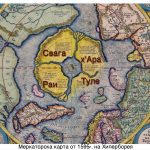
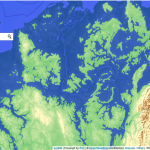 На карте изображены Свага, Туле, Рай и Х’Арра на территории современной республики Коми. Справо видно Лукоморье.
На карте изображены Свага, Туле, Рай и Х’Арра на территории современной республики Коми. Справо видно Лукоморье.
Около 1,5 миллиардов лет была осуществлена вынужденная посадка на Мидгард из-за поломки “небесной колесницы”. Потом наши Предки заселили Даарию (Дар Ариям ‒ Богами), прибывая с Земель, находящихся в созвездиях Малой и Большой Медведиц, Льва, Лебедя и Кассиопеи. Они отличаются друг от друга цветом радужной оболочки глаз, который зависит от спектра света их родных солнц: сереброглазые (сероглазые) ‒ Да’Арийцы, зеленоглазые – Х’Арийцы, синеглазые ‒ Светорусы, огненноглазые (к’Ариглазые) – Рассены. Да’Арийцы имеют качества предводителей-воинов. Х’Арийцы имеют качества ведунов-свещеннослужителей. Светорусы имеют качества ремесленников и изобретателей. Расены очень общительны и контактны.

Приземлились наши Предки в 18:00 (19:00) часов (современных часов или 15:144.1024 по старому) на Мидгард-Землю на континент Даария, находящийся на Русском Севере (Се Вера) (Русский Север ‒ Северный Магнитный полюс). Вот и выбрали это время для отсчёта, тем более тогда всегда был день и не наступала ночь, т.к. на Северном магнитном полюсе Ярило-Солнце светило постоянно в течении 40 дней (на Северном полярном круге (68° с.ш.) полярный день длится около 40-41 суток.) , был вечный день, о чём сказано в Сказах (том 4-ый Славяно-Арийских Вед) о том, что Ярило-Солнце не желало заходить на покой, чтобы постоянно наблюдать благие дела Расичей. Наши Предки пронесли Традицию через Круги Времён в изначальном варианте.
То, что мы “инопланетяне” говорит крепость наших костей, которая равно 0.8, тогда как почти у всех животных от 1.0 до 1.2, кроме тех, которых завезли на Мидгард, например кошек.
Ребёнок кричит при рождений потому что, раньше люди были ростом от 2 метров 50 сантиметров – 3 метров и выше (5, 15, 18) и время вынашивания ребенка было 1 год, давление выше, чем на галактической прародине, из-за чего ребёнку надо больше времени (в 9 месяцев ребенок рождается недоношенным из за наших маленьких тел), чтоб адаптироваться к такому давлению и научится держать голову, ползать, ходить. Хотя местные жители в первые часы, т.е. почти сразу начинают вставать и передвигаться на своих конечностях. По этому, Предки всегда рожали в воду, чтоб ребёнку было легче адаптироваться в новом мире.
Если человека заточить в темном пространстве, то он перейдёт на 36 и 48 часовые режимы вместо 24-го, а вот местные животные не изменяют свой привычный 24 часовой режим.
Лѣто ~1,96 миллиардное от сотворения нашей Солнечной системы.
Цель Гиядианцев было уравновешивание баланса вмешательства Андромедианцев с одной стороны и Плеядианцев с другой. И только Сирианцы, которые имели самый большой опыт патрулирования на этой планете имели общие с Гиядианцами цели. Но предствители звезды Сириуса в основном предпочитали выбирать себе тела дельфинов или верблюдов. О чём и написаны русские народные сказки о Коньке горбунке и умной рыбе, которая заплыла под лед в речку и может исполнять желания.
Появление Гиядианских аватаров на Земле привело к повышению роли решений Арктурианцев. Взрывной рост технологий был не во благо, но в противовес. Да, гиядианцы помогли сделать дроны, но не стали передавать системы автоматического уничтожения людей или устройства наземного роя с возможностью движения по вертикальной стене.
Гиядианские аватары обеспечили паритет финансового баланса и информационных возможностей и систем оплаты между олигархами Союзного государства и известной медиа иконой и корпорациями Западного полушария с образом самого богатого на Земле задрота Гейтса, затем Маска (когда Гейтс сильно состарился и уже перестал украшать плакаты со своим изображением).
На нашей планете уже живут совсем не обычные люди. Вот одна из таких людей. Условно назовем её Ангелом Сьерра-АлМихас. (Горная система между Серра-Тадехас и Серра-Невада) Она всегда в 5 или 6 чакре. Вибрации на уровне гортани. Выше не все аватары могут ощущать. Время для неё не существует. Она вообще почти уже не говорит. Легко управляет сознанием окружающих людей. Биополе не характерное для человека, а характерное для природы. По сути её не отличить от местности. Если закрыть глаза. Её биополе вообще не ощутимо. Но внутри до сих пор вторая душа рептилоидная. Для её удержания у неё уходят все силы. Поэтому она и не разговаривает ни с кем почти.
Мир существ планеты Земля замер в ожидании куда качнется баланс в сторону здравомыслия и исчезновения тех кто устаривает убийства на Земле (Ерёме) и разрушения или в сторону созидания нового-старого уклада, восстановления старинных знаний и гармонии в отношении между самыми близкими и далекими людьми. Многие аватары стали открыто называть цели и делится доступными знаниями. Одновременно с уважением относится к попыткам “темных” совершить обман, потому что по сути “тёмные” только помогали вычищать все тяжелые и слишком плотные наслоения, которые тащили многие души проживающих на Земле родов вниз к максимально плотному состоянию и максимально далекому от света мысли того единого и единственного куда все мы на пути возвращения. Именно “темные” создаваили условия, при которых “биороботы” или существа живущие по рефлексам как животные всё больнее ударялись о реальность Гора (бытия).
Рас все отчетливее был виден на горизонте многомерной реальности и образно поднимался все выше, как величайшая на планете земля гора Эверест, высотой более 8 тыс. метров, которую видно за 2 недели пути на автомобиле, но не видно её вершины, если находится возле её лона. Но даже гора Эверест на так крупна, как весь Гималайский массив, который уже однажды сохранил остатки великой цивилизации в Древней Индии, где речные дельфины из Сирианского наземного десанта до сих пор контролируют затопленные туннели Ганга возле города Патна. Возможно это тайна нашей планеты Земля, которую люди узнают в своё время. Многое еще должно случится и многое измениться. И прежде всего сами люди. Это и есть основное задание Гиядианских аватаров.
Каждый аватар обязан на пределе собственных земных возможностей довести до конца свою миссию. И тогда 144 000 небольших миссий соеденятся в единый всплеск, который достигнет многомерного пространства за пределами Ланиакеи. И все собранные ручейки знаний, впечатления, историй и эмоций соберутся в общее живое и цельное. Но зато у аватаров нет временных ограничений на Земле. Аватары почти не стареют. Поэтому и убивали выходцы из пекельных миров 200 летних старцев и великанов.
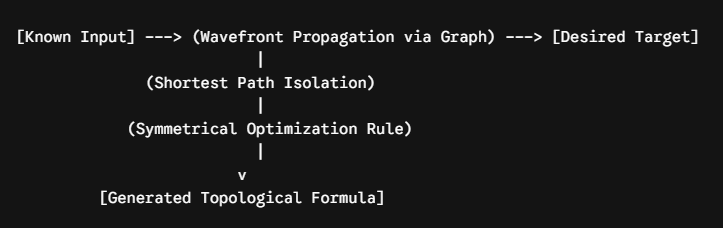
 mics, and material constants onto a unified, symmetric geometric algebra grid (as hinted by the script’s later integration with Python’s SymPy geometric algebra modules), we can treat physical space as code.
mics, and material constants onto a unified, symmetric geometric algebra grid (as hinted by the script’s later integration with Python’s SymPy geometric algebra modules), we can treat physical space as code.